Distributed System - Important Topics - Part 3
Names, Identifiers and Addresses, Flat naming, Structured Naming, Attribute-Based naming
Overview
- Names are identifiers for various things like entities, locations, and resources.
- The goal is to resolve these names to what they actually represent.
- Human-Friendly Names: How to structure names that are easy for humans to understand, such as in file systems or the World Wide Web.
- Example: World Wide Web, “www.google.com” is easier to remember than IP address like “142.250.191.46”.
- Location-Independent Naming: Finding a way to identify entities without depending on their current location.
- Example: DNS (Domain Name System), Resolves domain names to IP addresses, allowing you to access a website from anywhere.
- Attribute-Based Resolution: Resolving names by using attributes of the entity they refer to.
- Example: Database Query, Using SQL to find records based on attributes like “age” or “email”.
- Human-Friendly Names: How to structure names that are easy for humans to understand, such as in file systems or the World Wide Web.
Names, Identifiers and Addresses
- Name: in a distributed system is a string of bits or characters used to refer to an entity.
- Entity: something that is operated on using some access point.
- Entities: hosts, printers, disks, files, processes, users, mailboxes, web pages, graphical windows, messages,network connections, etc.
- Address: Name that refers to an access point of an entity.
- An entity may have multiple access points and addresses.
- Identifiers: Used to uniquely identify an entity.
- An identifier is a name with the following properties
- An identifier refers to at most one entity
- Each entity is referred to by at most one identifier
- An identifier always refers to the same entity (i.e., it is Never reused)
- Name resolution maps a name to its address.
- Name resolution is performed by a naming system.
- In a distributed system, a naming system is itself distributed.
- Naming system: a middleware that assists in name resolution
- Naming systems are classified into three classes based on the type of names used:
- Flat naming
- Structured naming
- Attribute-based naming
Flat Naming
- Identifiers are flat names
- fixed sized random bit strings
- does not contain any information on how to locate an entity
- good for machines
- How to resolve flat names?
- Broadcasting
- Forwarding pointers
- Home-based approaches: Mobile IP
- Distributed Hash Tables: Chord
Broadcasting
- Broadcast the identifier to the complete network.
- The entity associated with the identifier responds with its current address.
- Example: Address Resolution Protocol (ARP)
- Resolve an IP address to a MAC address.
- In this,
- IP address is the identifier of the entity
- MAC address is the address of the access point
- Not scalable in large networks
Forwarding Pointers
- for locating mobile entities
- When an entity moves from location A to location B, it leaves behind (in A) a reference to its new location at B.
- Example: Name resolution mechanism
- Follow the chain of pointers to reach the entity
- Update the entity’s reference when the present location is found
- Long chains results in longer resolution delays & are prone to failure due to broken links.
Home based Approaches
- Each mobile entity has a fixed IP address (home address)
- Entity’s home address is registered at a naming service
- Home node keeps track of current address of the entity (care‐of address)
- Entity updates the home about its current address (care‐of address) whenever it moves
Distributed Hash Table (DHT): Chord
- Every node is assigned a random m‐bit identifier
- Every entity is assigned a unique m‐bit key
- Entity with key k falls under jurisdiction of node with the smallest identifier id ≥ k , denoted as succ(k)
- How to resolve a key k to the address of succ(k)?
- Each node p maintains a finger table with at most m entries, value of the ith entry is FTp[i]= succ(p+2i‐1)
- To look up a key k, node p forwards the request to node q with index j where q = FTp[j] ≤ k < FTp[j+1]
- If p < k < FTp[1], the request is forwarded to FTp[1]
- A lookup requires O(logN) steps, where N is number of nodes in the system.
- Please refer to the assignment related to Chord OR the example below
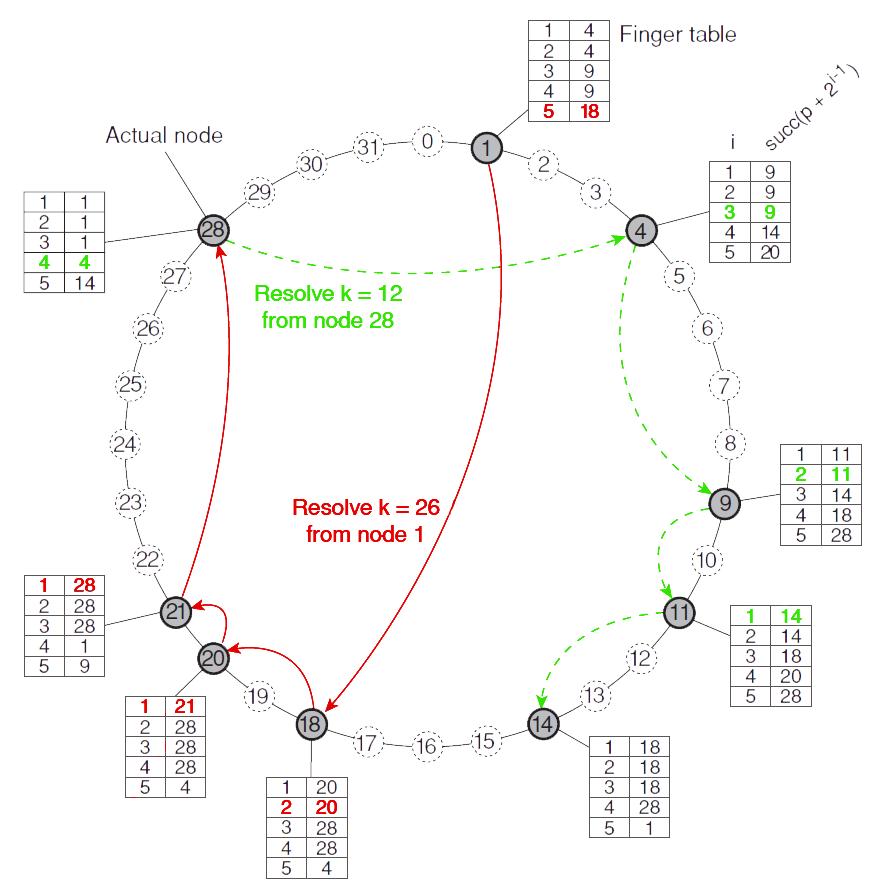
Resolving key 26 from node 1 (in red) and key 12 from node 28 (in green) in a Chord system.
Exploiting network proximity
- Problem: The logical organization of nodes in the overlay may lead to erratic message transfers in the underlying Internet: node p and node succ(p+1) may be very far apart.
- Solutions:
- Topology-aware node assignment: When assigning an ID to a node, make sure that nodes close in the ID space are also close in the network.
- Can be very difficult.
- Proximity routing: Maintain more than one possible successor, and forward to the closest.
- Proximity neighbor selection:When there is a choice of selecting who your neighbor will be (not in Chord), pick the closest one.
- Topology-aware node assignment: When assigning an ID to a node, make sure that nodes close in the ID space are also close in the network.
Hierarchical Approches
- Large-scale search tree for which the underlying network is divided into hierarchical domains.
-
Each domain is represented by a separate directory node.
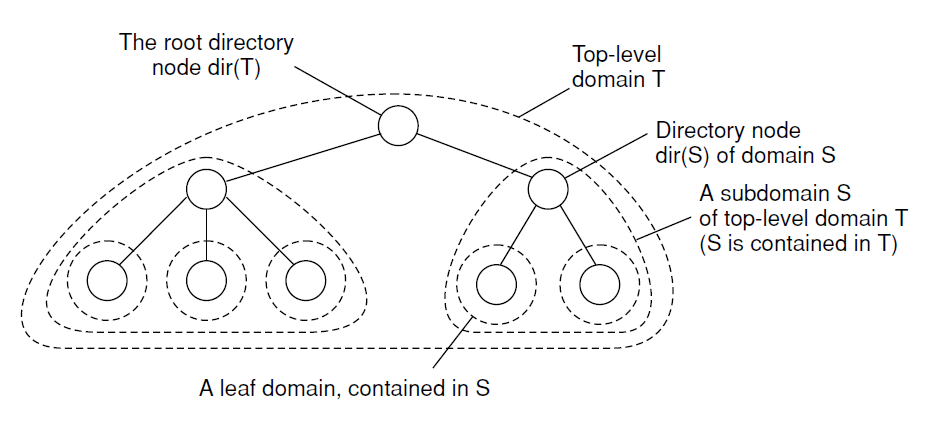
Hierarchical organization of a location service into domains, each having an associated directory node.
Structured Naming
-
Flat names are hard to remember, so human-friendly names are used which are structured and organized into name spaces.
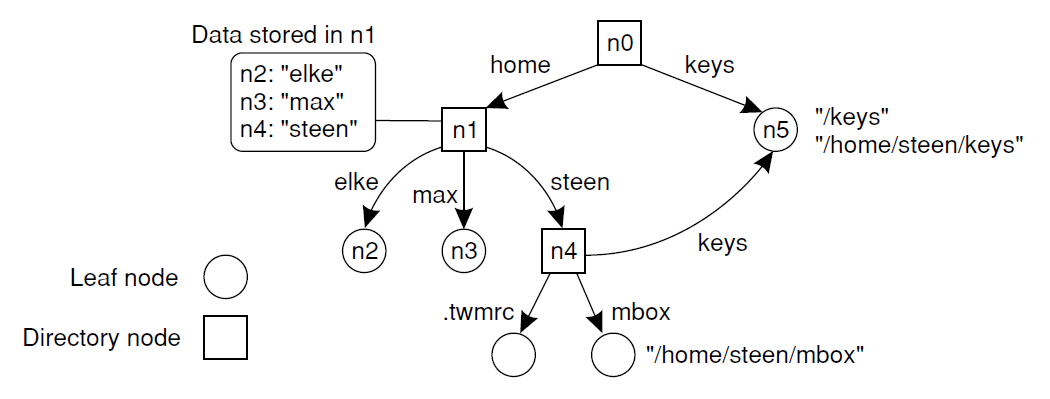
A general naming graph with a single root node.
-
Name Resolution: Process of looking up a name and it’s performed by traversing the graph.
-
Two main approaches to name resolution:
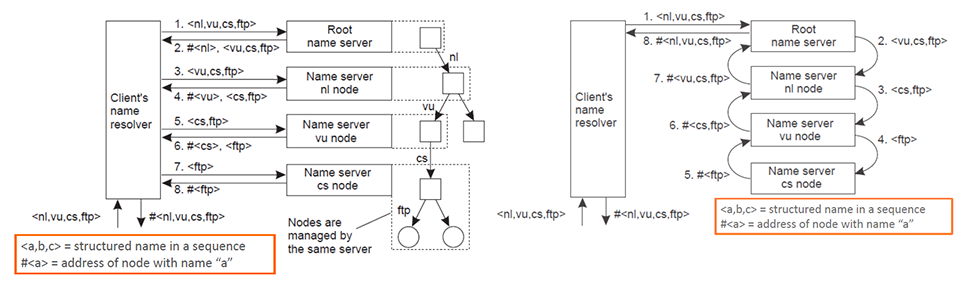
Resolving the name “ftp.cs.vu.nl”. Iterative name resolution (left) vs Recursive name resolution (right)
- Iterative Name Resolution:
- Client’s name resolver sends the complete name to the root name server.
- Root server partially resolves the name and returns the result to the client’s resolver, which then contacts the next name server in the hierarchy.
- This process continues until the complete name is resolved.
- Recursive Name Resolution:
- Each name server passes the partially resolved name to the next name server in the hierarchy.
- The last name server in the chain returns the fully resolved name to the first name server, which then returns it to the client’s resolver.
Iterative vs Recursive
- Iterative involves more steps but less server load.
-
Recursive is more efficient in caching and lowers communication costs.
- Name Space implementation: For a large‐scale distributed system is partitioned into three logical layers
- Global layer: high‐level directory nodes
- Administrational layer: directory nodes managed by a single organization
- Managerial layer: nodes that change frequently
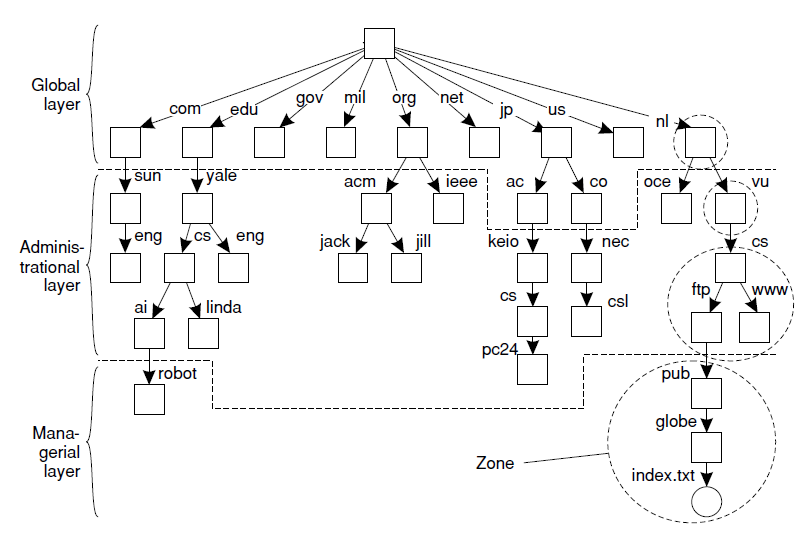
An example partitioning ofthe DNS name space, including Internet‐accessible files, into three layers.
Attribute based naming
- Also known as directory services
- Entities have a set of associated attributes for searching.
- Attributes can be simple like sender, recipient, subject in an email system.
- Describes an entity in terms of (attribute, value) pairs.
- Naming system returns entities that meet the user’s description.
- Examples:
- In an email system, messages can have attributes like sender, recipient, and subject.
- In a file system, files could have attributes like file type, owner, and date modified.
- Challenges:
- Exhaustive search through all descriptors can be performance-intensive.
- Balancing the load among servers for attribute-based queries is essential.
Synchronisation, Mutual exclusion, Election Algorithms
Synchronization in distributed processes involves:
- Clocks: Identifying when something occurred.
- Mutual exclusion: Cordinate between processes that access the same resource.
- Election algorithm: A group of entities elect one entity as the coordinator for solving a problem.
- Message consistency: Making sure all have the same view of events.
- Agreement: Ensuring everyone can agree on a proposed value.
These aspects are simple in non-distributed systems but become complex in distributed systems.
-
Time Synchronization
- Physical Clock Synchronization (or simply known as Clock Synchronization)
- actual time on computers are synchronized
- Logical Clock Synchronization
- Computers/processes are synchronized based on relative ordering of evenings
- Physical Clock Synchronization (or simply known as Clock Synchronization)
Physical Clock Synchronization or Clock Synchronization
- Skew: the difference between the times on two clocks (at any instant)
- Clock drift: counting of time at different rates
- Clock drift rate: the difference per unit of time from some ideal reference clock
- Correction Methods: Not a good idea to set a clock back for message ordering and software development environments.
- Gradual clock correction
- If Fast: The system will slow down the clock until it synchronizes with a reference clock.
- If Slow: The system will speed up the clock until synchronization is achieved.
- Ordinary quartz clocks drift by about 1 sec in 11-12 days. (10-6 secs/sec).
- High precision quartz clocks drift rate is about 10-7 or 10-8 secs/sec
Types of Physical Clocks:
- Quartz Clock:
- It uses a quartz oscillator that typically oscillates at 32KHz.
- The clock drift is around +/- 15 seconds per month.
- Not suitable for large distributed systems due to its drift.
- Atomic Clock:
- Uses Caesium 133 as an oscillator.
- Extremely accurate with a drift rate of 108 ppm.
- Often used in satellites for GPS.
- UTC
Problem
- Sometimes we simply need the exact time, not just an ordering.
- Solution: Universal Coordinated Time (UTC)
- Based on the number of transitions per second of the cesium 133 atom (accurate).
- At present, the real time is taken as the average of some 50 cesium clocks around the world.
- Introduces a leap second from time to time to compensate that days are getting longer.
- Precision:
- Ensure that the time difference between two clocks (from any two machines) is within a certain acceptable range called π.
- Equation:
|Cp(t) − Cq(t)| ≤ π- Meaning: The absolute difference between clock p’s time (
Cp) and clock q’s time (Cq) at any moment ‘t’ should be less than or equal to π.
- Meaning: The absolute difference between clock p’s time (
- Accuracy:
- Ensure a clock’s time is close to the actual or real time (UTC) by a specified range called α.
- Equation:
|Cp(t) − t| ≤ α- Meaning: The absolute difference between the time shown by machine p’s clock (
Cp) and the real time ‘t’ should be less than or equal to α.
- Meaning: The absolute difference between the time shown by machine p’s clock (
- Synchronization:
- Internal: Adjust clocks so they’re consistent with each other (precision).
- External: Adjust clocks so they’re close to the real time (accuracy).
NTP (Network Time Protocol)
NTP
- NTP is a protocol used to synchronize computer clocks over a network.
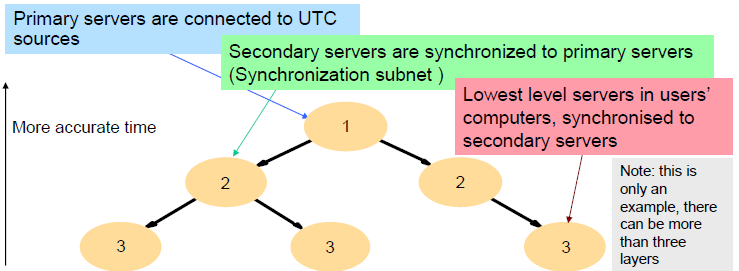
- It uses a hierarchical structure of time servers distributed across internet
- Each layer termed as a ‘stratum’. The stratum 0 or 1 (whichever is first) servers are the most accurate and are often connected to atomic clocks (UTC).
- NTP can adjust the time on a system gradually, compensating for latency and jitter, to align with the reference time.
- NTP relies on network communication to achieve synchronization.
- Scalable to large number of clients and servers
-
Authenticates time sources to protect against wrong time data
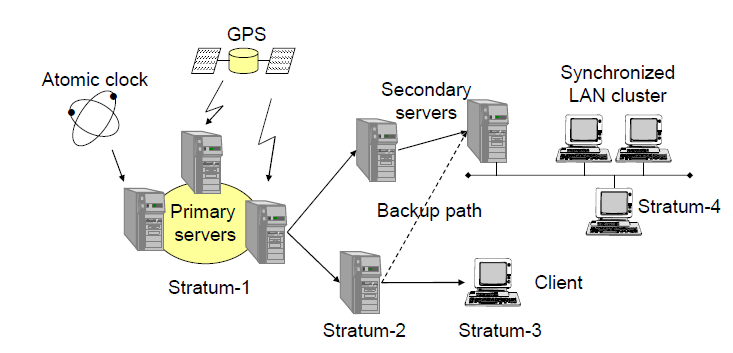
Levels in the synchronization subtree and exchange of timestamps between servers and clients via UDP
- Modes of synchronization
- Multicast:
- Server in LAN sends time to others, assumes delay. (Less accurate)
- Procedure Call:
- Server takes requests, adjusts time. (More accurate than multicast)
- Symmetric:
- Server pairs share time info.
- Used for high accuracy needs.
- All modes use UDP for time data transfer.
- Multicast:
Logical Clocks
- Happened-before Relationship:
- It’s important that processes agree on the order of events, not the exact time.
- Key rules:
- In the same process, if event a happens before b, it’s a → b.
- If a sends and b receives a message, it’s a → b.
- If a → b and b → c, then a → c.
-
Logical Clocks’s Problem: To keep a global view matching the happened-before order.
- Solutions:
- Use timestamps for events. If a → b, the timestamp of a is less than b.
- With no global clock, use a separate logical clock for each process.
- Solutions:
- Lamport’s Logical Clocks:
- P1 sends a message to P2, including the send time.
- P2 logs its receive time.
- If P2’s time is earlier than the sent time, it adjusts its clock slightly ahead (1 milli second at least).
- If P2’s time is later, no change is made.
-
This preserves the order of message events (“happens-before” relationship).
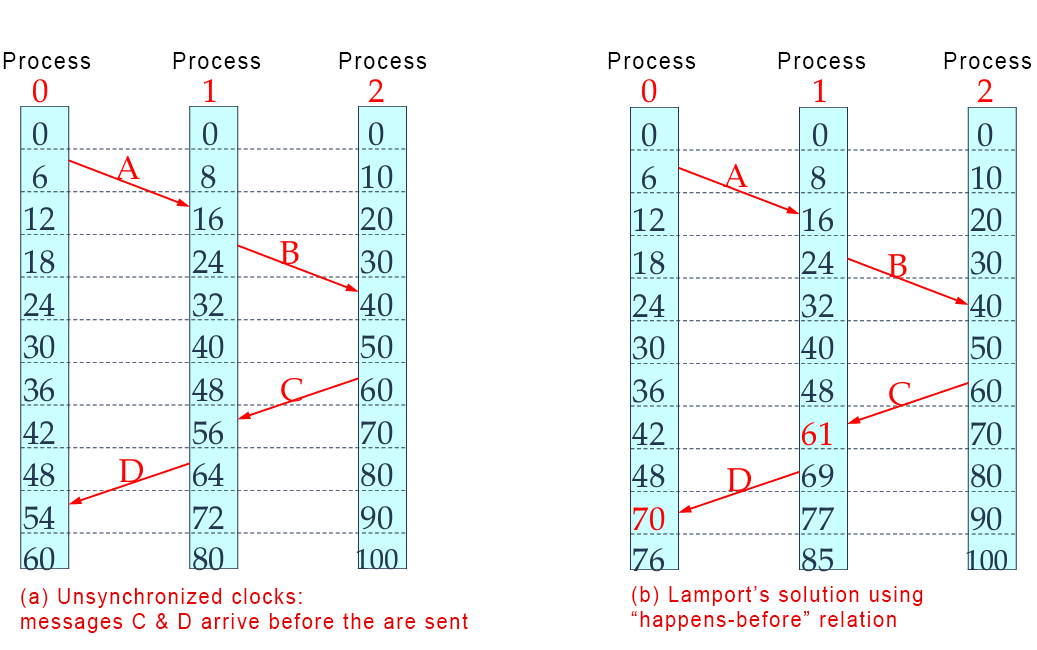
Example showing Lamport’s algorithm
- Logical clocks adjustments implemented in middleware.
Mutual Exclusion
- Distributed processes need to coordinate to access shared resources
- Uniprocessor systems use shared variables or OS support for mutual exclusion.
- Not enough for DS. Distributed systems use message passing for mutual exclusion.
Types of Distributed Mutual Exclusion:
Two main categories:
-
Permission-based Approaches: A process wanting to access a shared resource asks permission from one or multiple coordinators. Two types:
- Centralized Algorithms
- Decentralized Algorithms
-
Token-based Approaches:
- Every shared resource possesses a token.
- This token is passed among all processes.
- A process can access the resource only if it has the token.
Centralized Algorithm
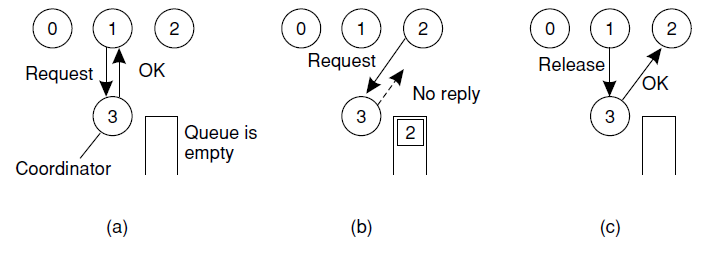
(a) Process 1 asks the coordinator for permission to access a shared resource. Permission is granted. (b) Process 2 then asks permission to access the same resource. The coordinator does not reply. (c) When process 1 releases the resource, it tells the coordinator, which then replies to 2.
Advantages:
- Guaranteed exclusive access by centralised control
- Fair algorithm guaranteeing order of requests
- No starvation of single processes
- Easy to implement
- Only three messages per entry in the critical region
Disadvantages:
- Coordinator becomes a single point of failure and a performance bottleneck
- It is hard to see, if the coordinator is blocked or crashed (in this case, a new coordinator has to be determined)
Decentralized Algorithm
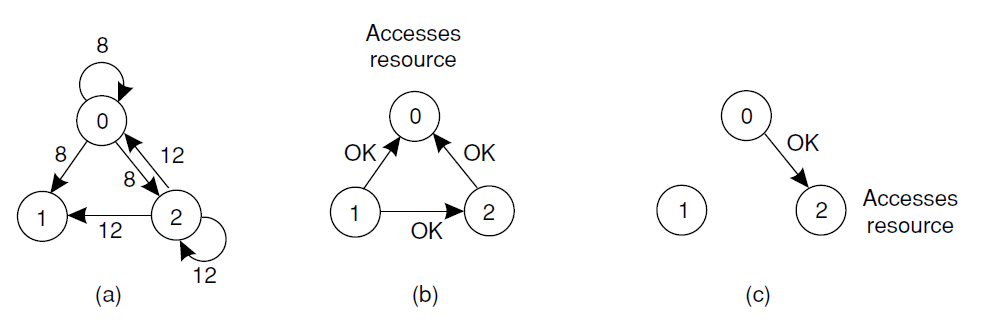
(a) Two processes want to access a shared resource at the samemoment. (b) Process 0 has the lowest timestamp, so it wins. (c) When process 0 is done, it sends an OK also, so 2 can now go ahead.
- Based on a total ordering of event (happens-before relation)
Algorithm:
- To enter a critical region, a process:
- Builds a message: {name of critical region; process number; current time}
- Sends the message to all other processes (assuming reliable transfer)
- When a process receives a request message:
- If not in critical region: sends OK.
- If in critical region: does not reply, queues request.
- If waiting to enter and has a later timestamp: sends OK; else queues request.
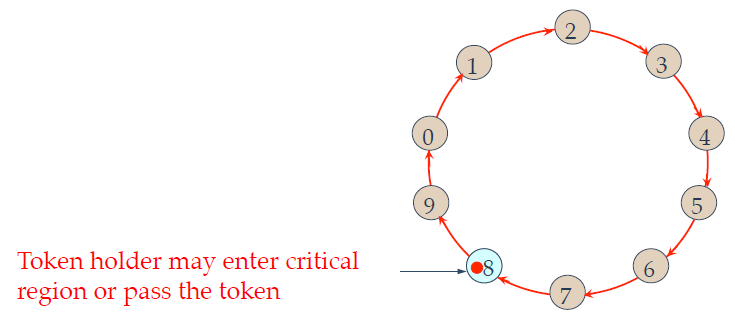
Token Ring
(a) Two processes want to access a shared resource at the samemoment. (b) Process 0 has the lowest timestamp, so it wins. (c) When process 0 is done, it sends an OK also, so 2 can now go ahead.
- Processes are organized in a logical ring
- A unique token circulates in the ring, and a process can enter its critical section only when it holds the token.
- After use, the token is passed to the next process.
- Gurantees mutual exclusion
- No starvation
Comparison of Mutual Exclusion Algorithms (Optional)
| Algorithm | Messages for Operations | Entry Delay | Potential Issues |
|---|---|---|---|
| Centralized | 3 | 2 | Coordinator crash |
| Distributed | 2 (n – 1) | 2 (n – 1) | Crash of any process |
| Token Ring | 1 to ∞ | 0 to n – 1 | Lost token, process crash |
- Centralized: Uses a main coordinator. Efficient but can fail if the coordinator crashes.
- Distributed: Messages are sent to peers. If a process fails, it can disrupt the system.
- Token Ring: Processes pass a “token” to enter critical sections. Delays can occur, especially if the token is lost or a process crashes.
Election Algorithms
- An algorithm requires that some process acts a coordinator.
Election by Bullying
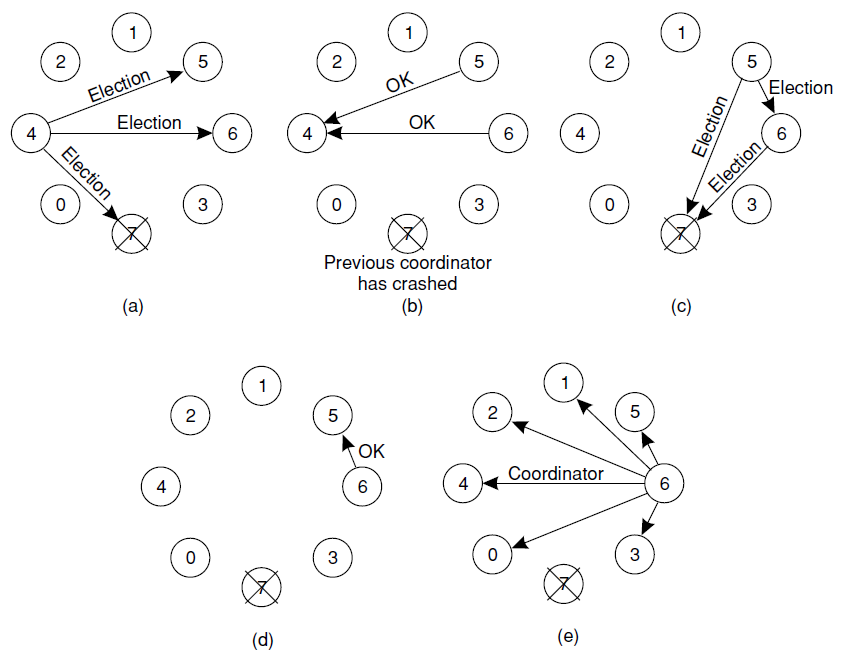
The bully election algorithm. (a) Process 4 holds an election. (b) Processes 5 and 6 respond, telling 4 to stop. (c) Now 5 and 6 each hold an election. (d) Process 6 tells 5 to stop. (e) Process 6 wins and tells everyone.
Algorithm:
- P sends an ELECTION message to all processes with higher numbers.
- If no one responds, P wins the election and becomes coordinator.
- If one of the higher-ups answers, it takes over. P’s job is done.
- Algorithm is named so because the dominance of higher ranked processes over lower ranked ones.
Election in a Ring
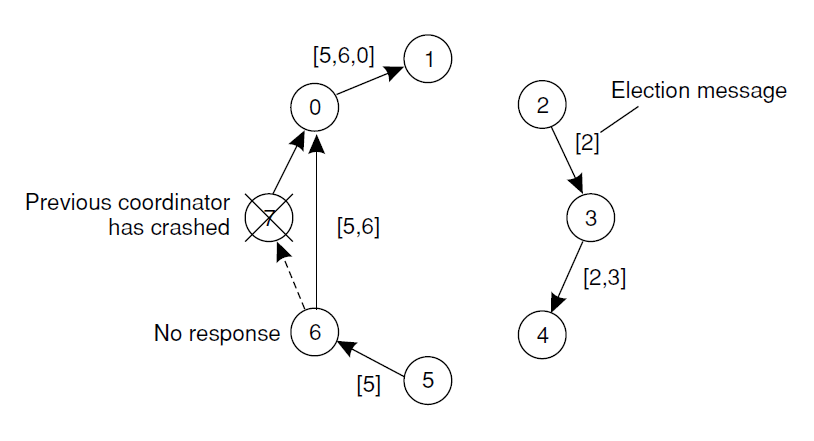
Election algorithm using a ring.
- Processes are physcally or logically ordered in a ring format.
- No token are used
Algorithm:
- Process detects failure, sends ELECTION message with its ID.
- Each process adds its ID to the message.
- Original sender receives message, identifies highest ID.
- Sends COORDINATOR message, sets highest ID as leader.
- All other processes are new ring members.